Obstacle-Avoidance Robocar
Raspberry Pi Pico carrier — DRV8833 dual H-bridge motor driver, I2C TOF sensor breakouts, screw-terminal motor outputs.
A small two-wheel robotics platform aimed at "boots into something useful" rather than "needs an afternoon of setup". The RP2040 ships with an obstacle-avoidance demo flashed; the BOOT button cycles through modes (wall-follow, line-follow, BT-controlled). Magnetic encoders feed back into a PID loop for repeatable turns.
Inspired by Blueprint.am's "robot car with obstacle avoidance" example.
| MCU Module | RP-01 Raspberry Pi Pico | Plugs into 2x 1x20 pin headers (J1/J2) |
| Motor Driver | DR-01 DRV8833 (TSSOP-16) | Dual H-bridge, 1.5A peak per channel, internal nSLEEP |
| Motor Output | OUT-01 4-pin screw terminal (J4) | A+, A-, B+, B- for two brushed DC motors |
| Sensors | SE-01 I2C bus + 3x XSHUT (J5) | Single 7-pin header carries V/GND/SDA/SCL + 3 enable lines for VL53L1X TOF sensors |
| Power | PW-01 Battery → DRV8833 V_M; Pico self-powered via VSYS | Two rails, common GND. Pico's onboard buck regulates 5-9V to 3V3 |
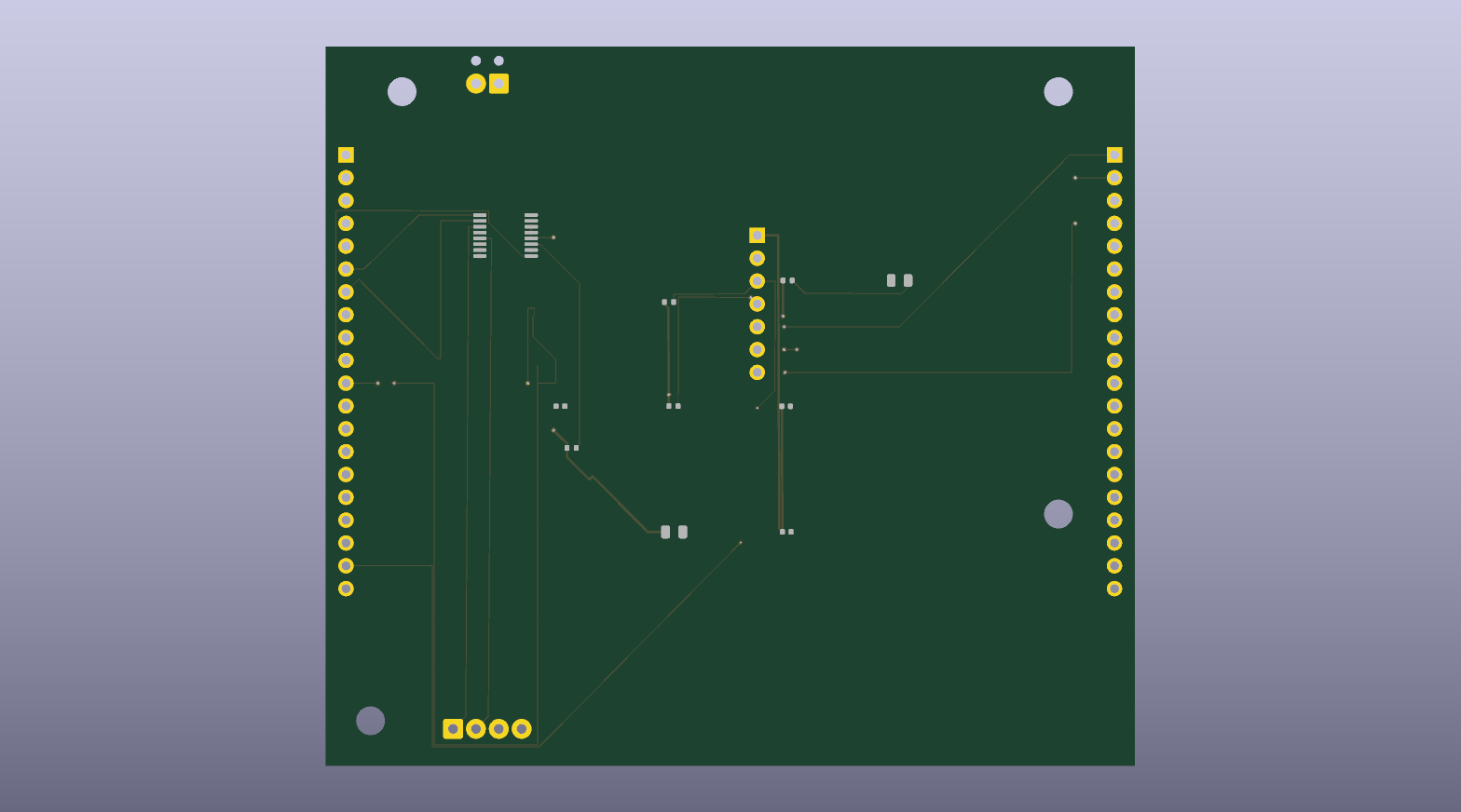
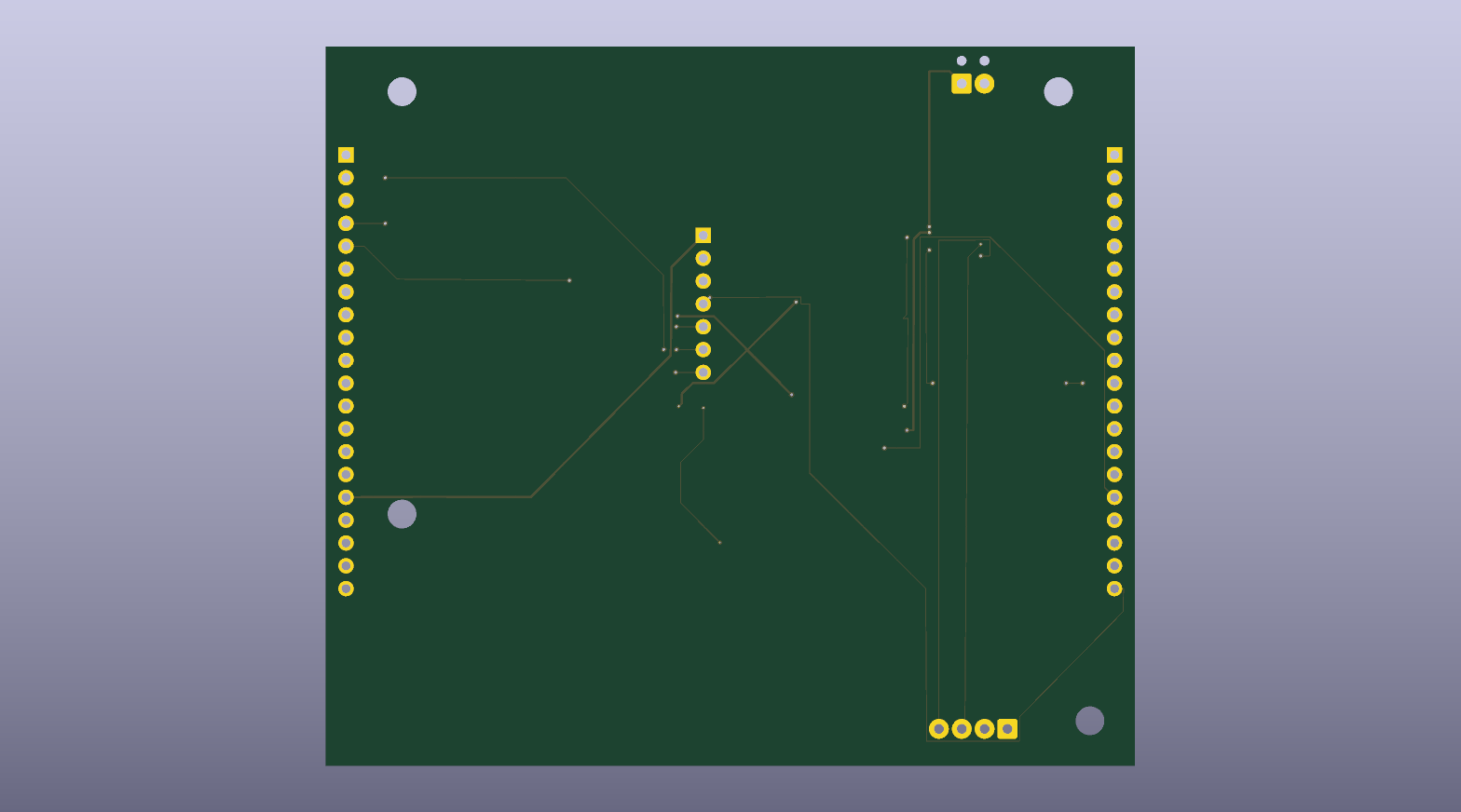
| Board | PB-01 2-layer, 90 × 80 mm | 15 components, auto-routed with 0 shorts and 0 unconnected |
| Ref | Category | MPN | Description | Qty | Unit | Ext | Stock | Links |
|---|---|---|---|---|---|---|---|---|
| J1 | PinHeader_1x20 | PinHeader_1x20_2.54mm | 1x20 0.1in pin header | 1 | $0.30 | $0.30 | — | LCSC |
| J2 | PinHeader_1x20 | PinHeader_1x20_2.54mm | 1x20 0.1in pin header | 1 | $0.30 | $0.30 | — | LCSC |
| J3 | Phoenix_MPT_2P | MPT 0.5/2-2.54 | 2-pin 2.54mm screw terminal | 1 | $0.45 | $0.45 | — | LCSC |
| J4 | Phoenix_MPT_4P | MPT 0.5/4-2.54 | 4-pin 2.54mm screw terminal | 1 | $0.85 | $0.85 | — | LCSC |
| J5 | PinHeader_1x07 | PinHeader_1x07_2.54mm | 1x7 0.1in pin header | 1 | $0.15 | $0.15 | — | LCSC |
| U1 | TSSOP-16 | DRV8833PWPR | Dual H-bridge motor driver | 1 | $0.36 | $0.36 | In stock | LCSC |
| C1 | C_0402 | CL05B104KO5NNNC B | 100nF 50V X7R 0402 | 1 | $0.0008 | $0.0008 | In stock | LCSC |
| C2 | C_0805 | CL21A106KAYNNNE B | 10uF 25V X5R 0805 | 1 | $0.0068 | $0.0068 | In stock | LCSC |
| C3 | C_0402 | CL05B104KO5NNNC B | 100nF 50V X7R 0402 | 1 | $0.0008 | $0.0008 | In stock | LCSC |
| C4 | C_0402 | CL05A105KA5NQNC B | 1uF 25V X5R 0402 | 1 | $0.0021 | $0.0021 | In stock | LCSC |
| R1 | R_0402 | RC0402FR-074K7L | 4.7k 0402 1% | 1 | $0.0004 | $0.0004 | In stock | LCSC |
| R2 | R_0402 | RC0402FR-074K7L | 4.7k 0402 1% | 1 | $0.0004 | $0.0004 | In stock | LCSC |
| R3 | R_0402 | RC0402FR-0710KL | 10k 0402 1% | 1 | $0.0004 | $0.0004 | In stock | LCSC |
| R4 | R_0402 | RC0402FR-071KL | 1k 0402 1% | 1 | $0.0004 | $0.0004 | In stock | LCSC |
| D1 | LED_0805 | LTST-C170KGKT | Green 0805 LED | 1 | $0.02 | $0.02 | In stock | LCSC |
| Total | $2.44 | |||||||
Real KiCad schematic auto-generated from the designgraph TOML by gen_kicad_schematic.py — generic block symbols with label-based connectivity, exported via kicad-cli sch export svg.
2-layer, 90 × 80 mm. Auto-placed and auto-routed by the Rust placer/router pipeline, with generated 3D, layer, enclosure, and DRC assets.







- Phase 01 Order PCBTools: JLCPCB account
- Run `target/release/pipeline hardware/design/robocar/main.toml hardware/design/robocar/robocar.kicad_pcb`.
- Open in KiCad, clean any remaining DRC warnings.
- Export gerbers; upload to JLCPCB. 2-layer, 1.6mm, qty 5 → ~$8 incl. shipping.
- Phase 02 Source partsTools: LCSC cart
- Use site/src/projects/robocar-bom.csv. ~$2.50 in passives + DRV8833.
- Order Raspberry Pi Pico separately (~$4).
- Order 3x VL53L1X breakouts (Adafruit, AliExpress, ~$3-5 each).
- Order 2x 6V brushed DC gearmotors with wheels (depends on chassis).